
( J‰lkik‰teen lis‰tty huomautus : T‰m‰n jutun aloittaminen johtui alunperin v‰‰rink‰sityksest‰, ei ole todellista ongelmaa! )
Tuntuu ett‰ olen kohdannut sellaisen potentiaalisen ongelman ett‰ Elementtimenetelm‰n perusteiden kurssilla k‰ytetty tasoristikon ratkaisumenetelm‰ ei ehk‰ sellaisenaan toimisi jos rakenteessa onkin 5 globaalia vapausastetta. On mahdollista ett‰ tenttiteht‰v‰ss‰ on juurikin ne 5 (todellista) globaalia vapausastetta, joten koetan t‰ss‰ varmistaa ett‰ on olemassa toimiva ratkaisu sellaiseen tapaukseen.
Kurssilla on tasoristikolle k‰ytetty l‰hteest‰ kopioitua rotaatiomatriisia [B] jonka dimensio on 4x4. T‰m‰n matriisin [B] avulla on mm. laskettu globaaleista solmusiirtymist‰ elementtien lokaalit solmusiirtym‰t. Ja seh‰n toimii ihan hienosti kun j‰rjestelm‰n globaaleja vapausasteita on esimerkiksi 2, 3 tai 4. T‰ytyy vaan sijoittaa arvot oikeisiin vapausasteisiin.
Mielest‰ni ei ole yksityiskohtaisesti k‰yty l‰pi kinemaattisen matriisin [B] muodostamista. Niinp‰ joku voi tˆrm‰t‰ tentiss‰ ongelmaan jos yritt‰‰ ratkaista viiden vapausasteen solmusiirtymi‰ suoraan 4x4 kinemaattisen matriisin [B] avulla. Sellainen ei voi suoraan onnistua. Olisiko mahdollista laatia 5x5 suuruinen matriisi joka tuottaisi lokaalit solmusiirtym‰t suoraan rakenteen globaaleista siirtymist‰?
Mist‰ siis kenk‰ puristaa? Aloitetaan ongelman setviminen siit‰ kohdasta kun on jo laskettu globaalit solmusiirtym‰t globaalin j‰ykkyysmatriisin k‰‰nteismatriisin [K]-1 ja kuormitusvektorin {F} kertolaskulla eli {U} = [K]-1 {F}
Tuloksena on siis koko j‰rjestelm‰n globaali solmusiirtym‰vektori {U} jossa viiden globaalin vapausasteen tapauksessa olisi 5 alkiota.
Miten kerrot 4x4 matriisilla 5-alkioisen pystyvektorin? (et mitenk‰‰n) Miten sijoitat 5 vapausastetta vain nelialkioiseen pystyvektoriin?
Sitten muodostetaan jokaiselle elementille oma solmusiirtym‰vektori {u} globaaleista tiedoista mutta lokaaleihin vapausasteisiin ...
÷ˆˆh ... olenkohan munaamassa itseni oikein perusteellisesti ...
T‰ss‰ vaiheessa alkaa tuntua ett‰ olen muistiossani sittenkin joron j‰ljill‰. Ongelmaa ei olekaan olemassa?
Justihin joo, ainoastaan ne alkiot valitaan koko j‰rjestelm‰n globaalista pystyvektorista {U} kunkin elementin omaan (mutta globaaleja tietoja sis‰lt‰v‰‰n) pystyvektoriin {u} jotka ovat ko. elementin lokaalien vapausasteiden mukaisia.
H‰mment‰v‰‰. Globaalit ja lokaalit ja varsinkin n‰m‰ lokaaleissa vapausasteissa olevat globaalit tiedot koituvat viel‰ kohtalokseni.
Tarkemmin ajatellen ei siin‰ sittenk‰‰n taida olla mit‰‰n erikoisempaa ongelmaa. En vaan selke‰sti tajunnut sit‰ ett‰ {U} ja {u} ovat eri vektoreita. Molemmissa on globaaleja tietoja, mutta {U} on rakenteen globaalien vapausasteiden mukainen ja {u} on kunkin elementin omien lokaalien vapausasteiden mukainen.
Globaalien solmusiirtymien vektorissa {U} on niin monta alkiota kuin mit‰ on globaaleja vapausasteita. Elementin omien solmusiirtymien vektorissa {u} on vain ne alkiot jotka sis‰ltyv‰t elementin nelj‰‰n vapausasteeseen. Niinp‰ 4x4 kinemaattinen matriisi [B] riitt‰‰ aivan mainiosti. Vaara ohi.
Ehk‰ minun pit‰isi kurssin opettajan K.Kiven tavoin ilmoittaa ett‰ sitten kun olen pissannut julkisesti housuihini, tulen hakemaan teilt‰ puoltoa el‰kehakemukseeni?
Noh, t‰m‰ voi kuitenkin lopulta olla opettavainen tarina, joten aion s‰ilytt‰‰ t‰m‰n kirjoitelman kaikesta huolimatta. N‰in sekaisin ihmisparka voi menn‰ kun aikansa pohtii globaaleja ja lokaaleja rinnakkain.
Mit‰ teen pelastaakseni kasvoni t‰m‰n murskaavan k‰mmin j‰lkeen? Yrit‰n k‰‰nt‰‰ tappioni voitoksi, kohota itsekunnioitukseni tuhkasta uusin voimin kuni Fenix-lintunen!
Kerrataanpa tunneilla tasoristikolle k‰ytetty‰ ratkaisumenetelm‰‰ oleellisilta osin. Ohitetaan alku ja todetaan ett‰ j‰rjestelm‰n globaalit solmusiirtym‰t ovat pystyvektorina {U} = [K]-1 {F} ja t‰st‰ on siirrytt‰v‰ tarkastelemaan rakenteen sauvoja lokaalisti.
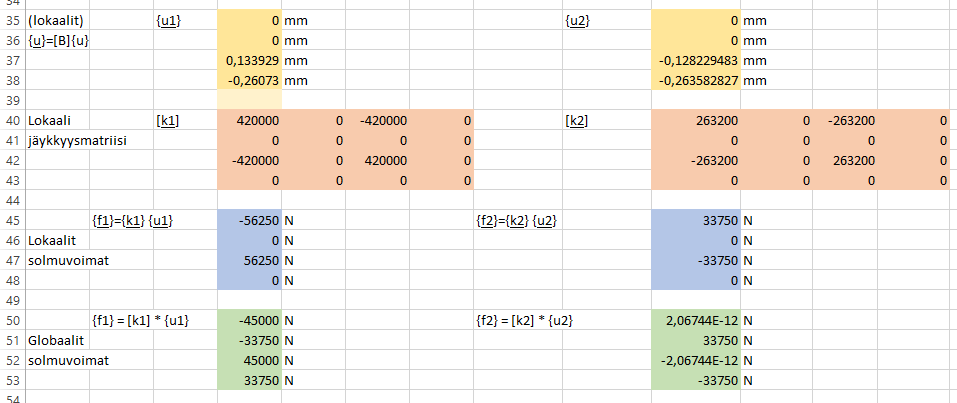
Yll‰ on n‰yte Excel-taulukosta jossa on laskettu harjoitusteht‰v‰‰ FES09H1. Se on yksinkertainen 2-elementtinen tasoristikko jossa oikeasti on vain kaksi globaalia vapausastetta, joten globaali j‰ykkyysmatriisi on pelkistett‰viss‰ kokoon 2x2. Ainoastaan sauvojen loppusolmuissa olevat lokaalit vapausasteet 3 ja 4 toteutuvat koska alkusolmut ovat kiinnitettyj‰. Niinp‰ globaalit solmusiirtym‰t sijoitetaan ratkaisun j‰lkeen j‰rjestelm‰n pystyvektorista {U} elementtien loppusolmujen pystyvektoreihin {u} lokaaleihin vapausasteisiin 3 ja 4 eli kolmanteen ja nelj‰nteen riviin. Sauvojen alkusolmujen lokaaleihin vapausasteisiin 1 ja 2 j‰‰ pelk‰t nollat.
Erehdyksest‰ viisastuneena painotamme erikoisen ankarasti sit‰ ett‰ sauvaelementiss‰ on lokaalisti aina 4 vapausastetta riippumatta siit‰ miten monta globaalia vapausastetta rakennelmassa on. Sauvaelementin pystyvektorissa on vapausasteiden mukaiset 4 rivi‰. Kinemaattinen matriisi [B] kuuluu sauvaelementille olla 4x4 matriisi jossa on rivej‰ ja sarakkeita kumpiakin sama m‰‰r‰, juurikin se sauvan lokaalien vapausasteiden mukainen nelj‰.
Jos rakennelmalla olisi kokonaista viisi globaalia vapausastetta niin elementtien j‰ykkyysmatriisit [k] olisivat 4x4 kuten sauvalle ja sen nelj‰lle vapausasteelle kuuluu ja niist‰ muodostettaisiin sijoittelusummauksella j‰rjestelm‰n globaali j‰ykkyysmatriisi [K] jonka dimensio olisi 5x5 globaalien vapausasteiden m‰‰r‰n mukaan. Kuormituksen pystyvektori {F} olisi myˆs jaettava viiden globaalin vapausasteen mukaisesti komponentteihin, joten se olisi 5-rivinen pystyvektori. Kertolaskusta {U} = [K]-1 {F} syntyv‰ globaali solmusiirtym‰vektori olisi myˆs 5-rivinen pystyvektori globaaleiden vapausasteiden m‰‰r‰n mukaan.
Ja sitten olisi ryhdytt‰v‰ miettim‰‰n elementtikohtaisesti ett‰ miten muodostetaan 4-riviset elementtien pystyvektorit {u}. Niihin tarvitsee vaan kopioida arvoja j‰rjestelm‰n solmusiirtym‰t sis‰lt‰v‰st‰ {U} -vektorista, mutta elementtien toteutuvat vapausasteet huomioiden. Jos elementin tietty solmu ei oikeasti p‰‰se liikkumaan kiinnityksen vuoksi, niin siihen ei globaalisti voi tulla solmusiirtym‰‰.
Periaatteessa t‰m‰ on mielest‰ni tavallaan k‰‰nteinen prosessi sille miten sauvojen j‰ykkyysmatriiseista [k] muodostettiin rakenteen globaali j‰ykkyysmatriisi [K]. Globaalit vapausasteet mapataan kunkin sauvaelementin lokaaleihin vapausasteisiin samalla periaatteella mutta eri suuntaan. Jos globaaleja vapausasteita on 5 ja sauvoissa on 4 vapausastetta niin eih‰n kaikki globaalit vapausasteet voi mitenk‰‰n toteutua miss‰‰n sauvassa, mutta eip‰ tarvitsekaan.
Ihan zuluna ved‰n t‰llaisen esimerkin. Jos tietyn sauvan lokaalit vapausasteet mapataan kokonaisuuden globaaleihin viiteen vapausasteeseen vaikkapa n‰in (nolla tarkoittaa ettei tieto oikeasti mene minnek‰‰n):
| lokaali | -> | globaali |
|---|---|---|
| 1 | -> | 0 |
| 2 | -> | 0 |
| 3 | -> | 1 |
| 4 | -> | 2 |
... niin p‰invastaiseen suuntaan eli globaaleista lokaaleihin siirrytt‰ess‰ globaalit vapausasteet 1 ja 2 menisiv‰t sen sauvan lokaaleihin vapausasteisiin 3 ja 4. Jos sauvan lokaalit vapausasteet eiv‰t alunperink‰‰n menneet vapausasteisiin 3, 4 ja 5 niin eip‰ noista globaaleista vapausasteista voi takaisin sen sauvan lokaaleihin vapausasteisiin jatkossakaan tulla mit‰‰n.

Millainen sauva-elementti on lokaalisti? Keskittyk‰‰mme hetkeksi siihen. Sauvaelementill‰ on lokaalisti nelj‰ vapausastetta joten se voidaan esitt‰‰ 4-alkioisena pystyvektorina. Alkusolmun vapausasteet 1 ja 2 ovat pystyvektorin ekalla ja tokalla rivill‰ ja loppusolmun vapausasteet 3 ja 4 ovat pystyvektorin kolmannella ja nelj‰nnell‰ rivill‰. Vapausasteet 1 ja 3 ovat lokaalisti X-suuntaisia ja vapausasteet 2 ja 4 ovat Y-suuntaisia sauvan omassa lokaalissa koordinaatistossa.
Ristikkorakenteessa k‰ytetty sauva on sik‰li erikoinen ett‰ se ei tarjoa solmuissaan lainkaan tukimomenttia. Sauvassa on ainoastaan normaalij‰nnitys, joko aksiaalista vetoa tai aksiaalista puristusta. Solmut, joissa rakenteen sauvat liittyv‰t toisiinsa, ajatellaan kitkattomiksi niveliksi jotka eiv‰t v‰lit‰ momenttia. Periaatteessa sauva p‰‰see vapaasti k‰‰ntym‰‰n solmun ymp‰ri (ainakin pienehkˆn kulman) koska solmu on tukimomenttia tarjoamaton nivel.
Varsinaisesti elementtimenetelm‰ t‰ss‰ yhteydess‰ haluaa k‰sitell‰ ainoastaan lineaarisia muutoksia joten muutokset rakenteessa pidet‰‰n melko pienin‰. Ei ole tarkoitus tutkia miten ristikko hajoaa.
Tavoite on ennenkaikkea elementtien lokaalit tiedot koska haluamme selvitt‰‰ elementtikohtaisen normaalij‰nnityksen ja tukireaktiot.
Olemme siis laskeneet elementeille lokaalit solmusiirtym‰t kertomalla kinemaattisella matriisilla [B] joka tasoristikolle on 4x4 matriisi. Saamme lokaalit solmusiirtym‰t kaavalla {u} = [B] {u}
Huomattakoon ett‰ Excel-taulukoissa er‰‰t arvot ovat k‰yt‰nnˆss‰ nollia, esim. 2,06E-12 on itseisarvoltaan eritt‰in pieni luku koska se on suuruusluokkaa 10-12, s‰pin‰‰ vasta kahdennessatoista desimaalissa. Laskutarkkuuden puitteissa se on pelkk‰ nolla.
Yl‰- ja alaindeksej‰ ei n‰iss‰ Excel-n‰ytteiss‰ ole k‰ytetty vaikka se lie Exceliss‰kin mahdollista. Esimerkiksi [k1] tarkoittaa oikeasti [k]1 ja k‰‰nteismatriisi [K]-1 on merkitty [K]^-1
Huomaa alleviivaukset lokaalien tunnusten kohdalla, kuten {f}, {u}, [k] ja alleviivauksen puuttuminen vastaavien globaalien tunnusten kohdalla kuten {f}, {u}, [k].
Haluaisimme p‰‰st‰ elementtien lokaaleihin solmuvoimiin {f} joille sin‰ns‰ p‰tee kaava {f} = [B] {f}, mutta emme voi sit‰ k‰ytt‰‰ koska emme t‰t‰ laskentatapaa noudattaessamme toistaiseksi tunne elementtien globaaleja solmuvoimia {f}.
Niinp‰ sovellamme kaavaa {f} = [k] {u} jossa [k] on elementin lokaali j‰ykkyysmatriisi. Alussahan on ratkaistu elementtien j‰ykkyysmatriisit [k], mutta n‰iss‰ on globaalit koordinaatit, joten emme voi k‰ytt‰‰ niit‰ t‰ss‰ yhteydess‰. Elementin lokaalin j‰ykkyysmatriisin [k] muodostaa helpostikin kunhan tuntee ko. elementin j‰ykkyysvakion k = E·A / L
| [k] | = |
| Ainoastaan ensimm‰isell‰ ja kolmannella rivill‰ ja sarakkeella olevat nollasta poikkeavat arvot kuvastavat sit‰ ett‰ lokaalisti sauva-elementiss‰ on j‰ykkyytt‰ ainoastaan ensimm‰isess‰ ja kolmannessa vapausasteessa eli alku- ja loppusolmujen X-suuntaisissa vapausasteissa. Y-suunnassa j‰ykkyytt‰ ei sauvassa lokaalisti ole, sit‰ todistavat pelk‰t nollat toisella ja nelj‰nnell‰ rivill‰ ja sarakkeella, eli alku- ja loppusolmujen toisessa ja nelj‰nness‰ vapausasteessa. |
Kun olemme ratkaisseet elementtien lokaalit solmuvoimat lokaalien tietojen avulla kaavalla {f} = [k] {u}, saamme elementtien globaalit solmuvoimat helposti kaavalla {f} = [k] {u} jossa siis k‰yt‰mme nimenomaan elementtien (globaaleja) matriiseja [k] ja elementtien globaaleja solmusiirtymi‰ {u}.
Sauvassa voi lokaalisti olla solmuvoima vain vapausasteissa 1 ja 3 eli lokaalissa X-suunnassa. Kun sauvassa ei ole elementtikuormaa niin lokaalisti X-suunnan voimien tulee kumota toisensa eli ne ovat toistensa vastalukuja. Kukin elementti t‰ytyy nimitt‰in olla tasapainossa.
Jos alkusolmuun lokaalisti vaikuttava X-suunnan voima on negatiivinen (vaikuttaa vasemmalle) ja loppusolmuun vaikuttava voima positiivinen (vaikuttaa oikealle) niin sauvassa on vetorasitus. Jos taas alkusolmuun lokaalisti (vapausaste 1) vaikuttaa positiivinen voima ja loppusolmuun (vapausaste 3) negatiivinen voima, niin sauvassa on puristusta.
Lopuksi haluan tarkastella kurssin opetusta ja k‰ytetty‰ ratkaisumenetelm‰‰ kriittisesti, mutta tokikin rakentavassa hengess‰.
Oppimisj‰rjestelm‰ Moodlessa PDF-tiedostoina oleva (osin, ei koko) oppikirja noudattaa jonkin verran eri menetelm‰‰ kuin mit‰ kurssin l‰hiopetuksessa toteutettiin. Kirjassa k‰ytet‰‰n yht‰lˆryhmien ratkaisua, eik‰ k‰‰nteismatriisilla kertomista. Kirja on hiukan korkealentoinen ja akateeminen. Sik‰li oppikirjasta ei saa mahdollisimman suurta tukea. Sielt‰ kuitenkin n‰kee miten muodostetaan esim. rotaatiomatriisi [B] eli ns. kinemaattinen matriisi. Ja tarjoaahan se vaihtoehtoisen n‰kˆkulman aiheeseen.
Kurssilla on laskelmien tekemisess‰ tukeuduttu Excel-taulukkolaskentaan. Se tekee esim. matriisin k‰‰nt‰misest‰ sek‰ matriisin ja pystyvektorin kertolaskusta helppoa. Ratkaisumenetelm‰n dokumentointi kuitenkin mielest‰ni hiukan onnahtaa jos se on pelk‰st‰‰n Excel-tiedoston varassa. Pit‰isin omien muistiinpanojen yll‰pitoa t‰rke‰n‰ tuolla melko tiivistahtisella kurssilla. Excel-taulukko ei oikein kelpaa opiskelun dokumentoinniksi koska se on kuitenkin hiukan takkuinen luettava eik‰ se tarjoa vastausta kysymykseen "miksi?".
Exceliss‰ t‰rkeit‰ funktioita ovat (kieliversiosta riippuen) mm. MINVERSE eli MKƒƒNTEINEN, MMULT eli MKERRO matriisien ja vektoreiden k‰sittelyss‰. Matriisien kanssa oleellinen alueiden valinta ja n‰pp‰ily-yhdistelm‰ Ctrl + Shift + Enter on tullut hyvin opeteltua. Exceliss‰ on syyt‰ pit‰‰ mieless‰ ett‰ se k‰sittelee kulmia radiaaneina. Astemuunnokset t‰ytyy tehd‰ tarvittaessa erikseen. Solun kaava alkaa yht‰suuruus-merkill‰ ja desimaalierottimena on meik‰l‰isiss‰ oloissa syyt‰ k‰ytt‰‰ pilkkua.
Omat muistiinpanot ovat t‰rkeit‰, mutta viel‰ paremmin asiat oppinee jos tekee omia ohjelmia teht‰vien ratkaisuun esim. JavaScript-kielell‰ (kuten n‰ill‰ sivuilla hiukan olen koettanut tehd‰). Tosin silloin joutuu takkuamaan monien muidenkin asioiden kansssa kuin varsinaisen elementtimenetelm‰n bisneslogiikan kanssa. Ohjelman rakentamisessa on moninkertainen tyˆ Excel-taulukkoon n‰hden ja ohjelmastakin on vaikea tehd‰ yleisp‰tev‰‰. Ratkaisun joutuu rakentamaan tietylle tapaukselle ja toisenlainen tapaus vaatii erilaiset ratkaisut. Omat ongelmansa ohjelmoimalla ratkaisemisessakin siis on, mutta paatuneelle ohjelmoijalle se on luonnollinen valinta.
Erikoisesti JavaScriptin suhteen huomiota vaatii mm. k‰‰nteismatriisin toteuttaminen ja se ett‰ matriisien ja vektoreiden v‰lill‰ on teht‰v‰ ero. Excel k‰sittelee matriiseja ja vektoreita oleellisesti samalla tavalla mutta JavaScriptiss‰ ei esimerkiksi voi luoda sellaista taulukkoa joka olisi kaksiulotteinen mutta riveill‰ olisi vain yksi alkio. Voi toki yritt‰‰ seuraavaa:
// var a, b, c; var V = new Array ( new Array ( a ), new Array ( b ), new Array ( c ) );
... eik‰ se ole syntaktisesti v‰‰rin, mutta lopputulos ei kuitenkaan ehk‰ ole ihan sit‰ mit‰ toivottiin.
En ole kokeillut miss‰ m‰‰rin ohjelmoitavaa graafista laskinta voisi k‰ytt‰‰ apuna pienehkˆjen teht‰vien ratkaisussa, mutta ajatuksena mielenkiintoinen.
Kuvioiden piirtely on oma alueensa. Kuviot on kurssilla tiet‰‰kseni t‰ytynyt piirt‰‰ k‰sin paperille. Kotiteht‰viss‰ paperipiirros on ohjeen mukaan napattu k‰nnykk‰kameralla ja liitetty Excel-taulukon kanssa samaan pakattuun ZIP-tiedostoon sek‰ palautettu oppimisj‰rjestelm‰ Moodleen.
Suttupaperia pit‰isin tarpeellisena apuv‰lineen‰ teht‰vien ratkaisussa. Tavalliselle funktiolaskimellekin voi olla k‰yttˆ‰.
En viel‰ tied‰ miten hyvin oppi on kurssilla mennyt perille, joten en voi langettaa lopullista tuomiota t‰st‰ menetelm‰st‰. Tentti on aivan n‰ill‰ n‰ppylˆill‰, mutta taitojen varsinaisen koetinkiven palauttamiseen on siit‰ viel‰ kokonainen kuukausi aikaa. Harmittamaan vaan j‰‰ se ett‰ avaruusristikot ja avaruuskeh‰t j‰‰v‰t kurssilla kokonaan k‰sittelem‰tt‰. Vaativuudeltaan huippua kurssilla on yksinkertaisen 3-palkkisen tasokeh‰n ratkaisu elementtikuormituksin.
Pelk‰st‰‰n k‰‰nteismatriisin k‰yttˆˆn en ole t‰ysin tyytyv‰inen. Se on Excelill‰ helppoa, ainakin pienten matriisien tapauksessa, mutta jos alkioita olisi todella paljon niin minusta matriisin k‰‰nt‰minen olisi suhteellisen vaatimattomin resurssein esim. JavaScript-ohjelmassa huono vaihtoehto. Ohjelmoijalle mielest‰ni olisi t‰rke‰‰ opetella ratkaisu yht‰lˆryhmien kautta koska se oletettavasti on isoilla matriiseilla huomattavasti taloudellisempaa.
Hyv‰n‰ pid‰n kurssia sik‰li ett‰ siin‰ todella sai konkreettisen tuntuman elementtimenetelm‰n periaatteisiin. Aksiaalisesta sauvasta aloittaminen on minusta ihan hyv‰ ratkaisu, vaikka sill‰ ei sin‰ns‰ mit‰‰n k‰yttˆ‰ olekaan. Ainakin pienemmille j‰rjestelmille globaaleihin vapausasteisiin keskittyminen ja k‰yt‰nnˆllinen ratkaisu on hyv‰ ja oikeaa oivallusta nopeasti tarjoava vaihtoehto. Kire‰ aikataulu on ep‰ilem‰tt‰ rasite.
Monimutkaisemmille rakenteille (esim. 3-ulotteiset kuorirakenteet) t‰llainen laskennan etenemisen osalta suhteellisen havainnollinen Excel-tyyppinen ratkaisu k‰y nopeasti k‰yt‰nnˆss‰ mahdottomaksi kun j‰rjestelm‰ muuttuu vaativammaksi. Silloin tarvitaan j‰re‰mpi‰ tyˆkaluja, mutta toimintojensa teknisen toteuttamisen osalta ne ovat ep‰havainnollisempia, k‰ytt‰j‰ ei n‰‰ mit‰ julkisivun takana varsinaisesti tapahtuu. Niit‰kin tsydeeemej‰ on mahdollista k‰ytt‰‰ v‰‰rin, jopa aivan p‰in helvetti‰, joten j‰rki ja osaaminen t‰ytyy niiss‰kin olla mukana. Korskea tulostus ei todista ett‰ olisi laskettu oikein.